

要說現(xiàn)在制造業(yè)什么最火?
答案一定非“人工智能”莫屬了
而人工智能的火熱
也帶火了與之關(guān)系密切的機器視覺
如果說“人工智能”是一個人的大腦的話
那機器視覺就是這個人的眼睛

以前我們所說的機器視覺
通常是指2D的視覺系統(tǒng)
即通過攝像頭拍到一個平面的照片
然后通過圖像分析或比對來識別物體
能看到物體一個平面上特征
可用于缺失/存在檢測、離散對象分析
圖案對齊、條形碼和光學(xué)字符識別
以及基于邊緣檢測的各種二維幾何分析
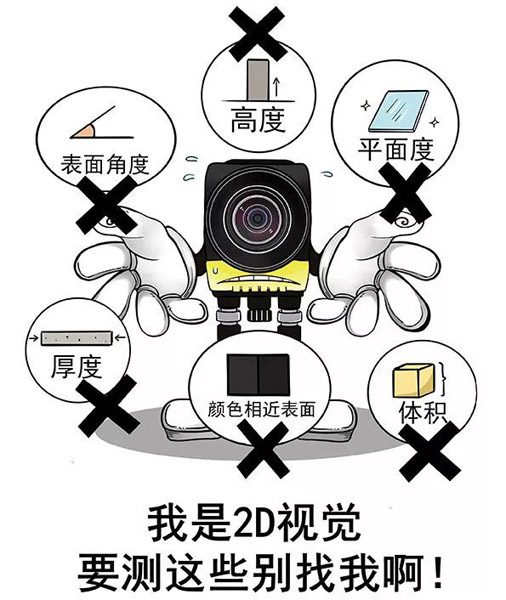
由于2D視覺無法獲得物體的空間坐標(biāo)信息
所以不支持與形狀相關(guān)的測量
諸如物體平面度、表面角度、體積
或者區(qū)分相同顏色的物體之類的特征
或者在具有接觸側(cè)的物體位置之間進行區(qū)分
而且2D視覺測量物體的對比度
這意味著特別依賴于光照和顏色/灰度變化
測量精度易受變量照明條件的影響
因此,隨著現(xiàn)在對精確度和自動化的要求越來越高
3D機器視覺變得更受歡迎
在許多“痛點型應(yīng)用場景”中大顯身手
成為當(dāng)前“智”造業(yè)最炙手可熱的技術(shù)之一
業(yè)界認(rèn)為2D向3D的轉(zhuǎn)變將成為
繼黑白到彩色、低分辨率到高分辨率
靜態(tài)圖像到動態(tài)影像后的第四次革命
3D視覺將是人工智能“開眼看世界”的提供者!
相比2D
3D機器視覺具有以下優(yōu)點
① 在線檢測快速移動的目標(biāo)物,獲取形狀和對比度
?、?消除手動檢查帶來的錯誤
③ 實現(xiàn)部件和裝配的100%在線質(zhì)量控制
?、?最大限度地縮短檢測周期和召回
⑤ 最大限度地提高生產(chǎn)質(zhì)量和生產(chǎn)量
?、?對比度不變,是檢查低對比度物體的理想選擇
?、?對較小的照明變化或環(huán)境光不敏感
⑧ 建立大型物體檢測的多傳感器設(shè)置更簡單
正是因為有這么多的優(yōu)勢
3D機器視覺在業(yè)界越來越火熱
可是,你對它了解多少呢?
其實,要想真正了解3D視覺
首先得了解3D視覺的測量原理
目前市場上主流的有四種3D視覺技術(shù)
雙目視覺、TOF、結(jié)構(gòu)光和激光三角測量
雙目技術(shù)是目前較為廣泛的3D視覺系統(tǒng)
它的原理就像我們?nèi)说膬芍谎劬?
用兩個視點觀察同一景物
以獲取在不同視角下的感知圖像
然后通過三角測量原理計算圖像的視差
來獲取景物的三維信息

由于雙目技術(shù)原理簡單
不需要使用特殊的發(fā)射器和接收器
只需要在自然光照下就能獲得三維信息
所以雙目技術(shù)具有
系統(tǒng)結(jié)構(gòu)簡單、實現(xiàn)靈活和成本低的優(yōu)點
適合于制造現(xiàn)場的在線、產(chǎn)品檢測和質(zhì)量控制
不過雙目技術(shù)的劣勢是算法復(fù)雜,計算量大
而且光照較暗或者過度曝光的情況下效果差
第二個技術(shù)是TOF飛行時間法成像技術(shù)
TOF是Time Of Flight的簡寫
它的原理通過給目標(biāo)物連續(xù)發(fā)送光脈沖
然后用傳感器接收從物體返回的光
通過探測光脈沖的飛行時間來得到目標(biāo)物距離
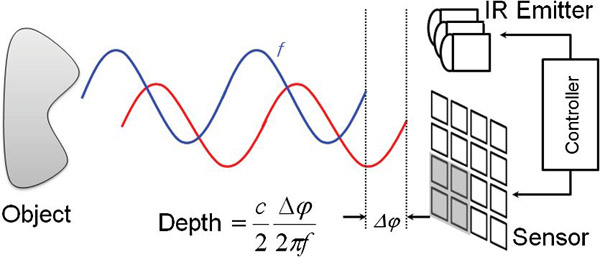
TOF的核心部件是光源和感光接收模塊
由于TOF是根據(jù)公式直接輸出深度信息
不需要用類似雙目視覺的算法來計算
所以具有響應(yīng)快、軟件簡單、識別距離遠的特點
而且由于不需要進行灰度圖像的獲取與分析
因此不受外界光源物體表面性質(zhì)影響
不過TOF技術(shù)的缺點是
分辨率低、不能精密成像、而且成本高
由于雙目和TOF都有各自的缺點
所以就有了第三種方式
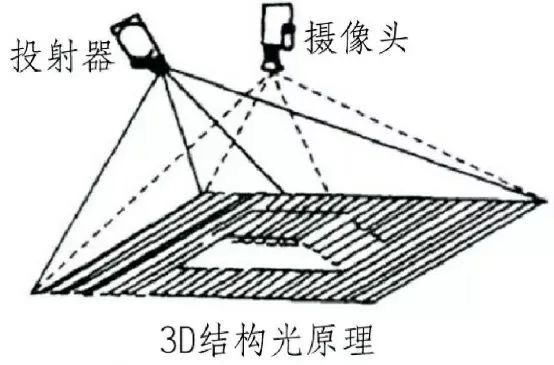
——3D結(jié)構(gòu)光技術(shù)
它通過一個光源投射出一束結(jié)構(gòu)光
這結(jié)構(gòu)光可不是普通的光
而是具備一定結(jié)構(gòu)(比如黑白相間)的光線
打到想要測量的物體上表面
因為物體有不同的形狀
會對這樣的一些條紋或斑點發(fā)生不同的變形
有這樣的變形之后
通過算法可以計算出距離、形狀、尺寸等信息
從而獲得物體的三維圖像
由于3D結(jié)構(gòu)光技術(shù)
既不需要用很精準(zhǔn)的時間延時來測量
又解決雙目中匹配算法的復(fù)雜度和魯棒性問題
所以具有計算簡單、測量精度較高的優(yōu)勢
而且
對于弱光環(huán)境、無明顯紋理和形狀變化的表面
同樣都可進行精密測量
所以越來越多的3D視覺高端應(yīng)用采用結(jié)構(gòu)光技術(shù)
最后一種是和結(jié)構(gòu)光類似的激光三角測量法
它基于光學(xué)三角原理
根據(jù)光源、物體和檢測器三者之間的幾何成像關(guān)系
來確定空間物體各點的三維坐標(biāo)
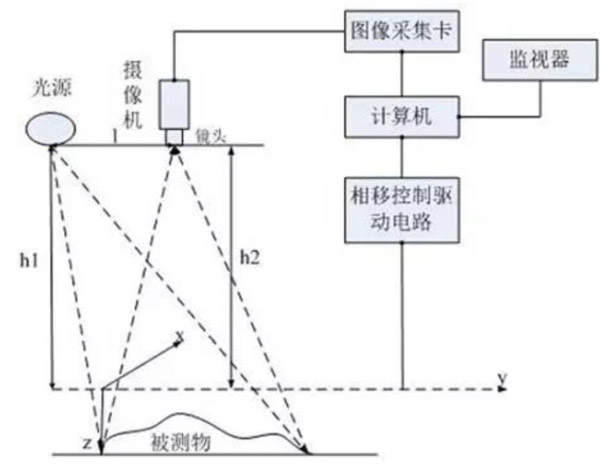
通常用激光作為光源,用CCD相機作為檢測器
具有結(jié)構(gòu)光3D視覺的優(yōu)點
精準(zhǔn)、快速、成本低
不過
由于根據(jù)三角原理計算
被測物體越遠
在CCD 上的位置差別就越小
所以三角測量法在近距離下的精度很高
但是隨著距離越來越遠
其測量的精度會越來越差
對于這四種3D視覺原理各自的優(yōu)缺點
我們可以簡單總結(jié)為以下的表格

從上面的表格可以看出
四種主流的3D視覺測量原理都有各自的優(yōu)缺點
那么
對于可靠性和精度要求極高的制造業(yè)來說
有沒有將幾種測量原理結(jié)合一起的3D視覺呢?
其實全球頂尖的3D視覺廠商也想到了這樣的方案
比如專注于三維視覺40多年的
LMI Technologies公司
就有一款采用雙目+結(jié)構(gòu)光設(shè)計的3D視覺傳感器
——Gocator 3504

它采用500萬像素立體相機雙目快照式傳感器
利用藍色結(jié)構(gòu)光獲得極高的三維測量精度
XY方向分辨率達6.7μm、Z方向精度達0.2μm
一次快照即可實現(xiàn)高精度3D表面和幾何檢測
可以檢測到小型電子元器件的微小特征
可以達到計量等級的精度和準(zhǔn)確度
在高速在線檢測過程中實現(xiàn)100%的質(zhì)量控制
它的測量原理圖如下

我們不妨通過Gocator? 3504來看看
3D視覺的應(yīng)用優(yōu)勢

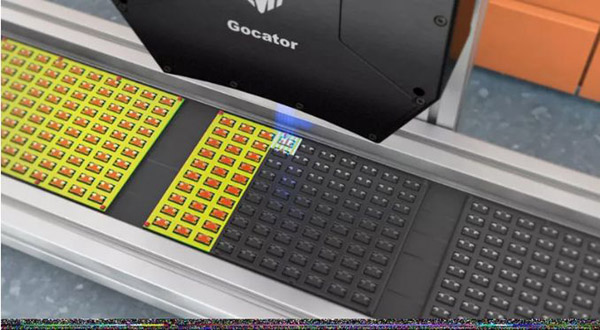
應(yīng)用一:芯片上的微型條形碼檢測

應(yīng)用二:銅線圈檢測
應(yīng)用三:連接器引腳檢測
可以看到,
在這些精確度要求極高的場合
普通2D機器視覺是無法滿足要求的
看到這里
你可能會問
那對于像手機玻璃表面、金屬、透明材料
這些高反光表面
這些2D視覺基本無能為力的檢測場合
3D視覺有沒有辦法解決呢?
Of course!
這也是3D視覺的一大特點!
還是以LMI Technologies的一款3D視覺來說明
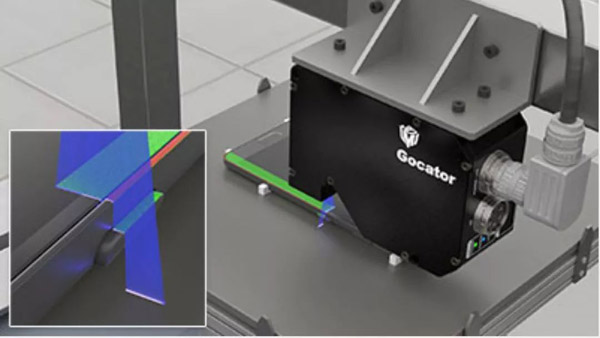
這款產(chǎn)品型號是Gocator? 2500系列
這是一款高速3D線激光輪廓傳感器
采用藍色激光+定制光學(xué)設(shè)計
集掃描、測量和控制于一體,無需額外控制器
內(nèi)置豐富的測量算法
特別適合低對比度和高反光目標(biāo)物的測量
并針對微小零部件的應(yīng)用特別優(yōu)化
重點專注于消費電子行業(yè)。
掃描速度最高可達10 kHz
在線生產(chǎn)達到微米級別分辨率
下面是它的一些典型應(yīng)用場合
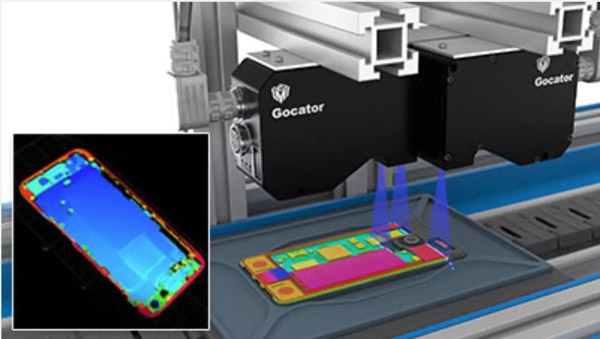


手機間隙和面差檢測
手機部件驗證
膠路檢測
同時掃描鏡面和漫反射目標(biāo)物
怎么樣?
看了今天關(guān)于3D視覺的介紹
是不是覺得3D視覺確實比2D要厲害多了!
其實,縱觀行業(yè)發(fā)展
2D視覺雖為當(dāng)前主流
但隨著測量精度要求越來越高
被測物體條件越來越復(fù)雜
2D系統(tǒng)的缺陷也愈發(fā)突出
而3D視覺技術(shù)不斷獲得突破
在精度、靈活性和速度方面都是2D無可比擬的
所以3D機器視覺檢測有取代2D系統(tǒng)的趨勢
相信3D視覺未來將成為主流視覺系統(tǒng)
3D機器視覺來了,而你準(zhǔn)備好了嗎?



